ฮอนด้าร่วมกับเอไอเอสที พัฒนาหุ่นยนต์สำรวจพื้นที่เสี่ยงภัย
honda
ฮอนด้าร่วมกับเอไอเอสที พัฒนาหุ่นยนต์สำรวจพื้นที่เสี่ยงภัย เริ่มออกปฏิบัติงานที่โรงไฟฟ้านิวเคลียร์ฟุกุชิมา ไดอิจิในญี่ปุ่น
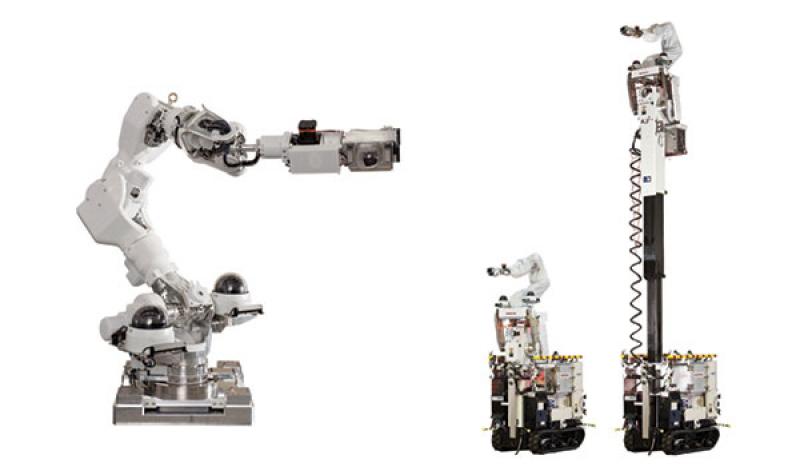
บริษัท ฮอนด้า มอเตอร์ จำกัด และสถาบันเอไอเอสที (The National Institute of Advanced Industrial Science and Technology: AIST) ร่วมกันพัฒนาหุ่นยนต์สำรวจที่มีระบบควบคุมการทำงานจากระยะไกล โดยเริ่มออกสำรวจพื้นที่ชั้น 1 ของโรงปฏิกรณ์นิวเคลียร์ ณ โรงไฟฟ้านิวเคลียร์ฟุกุชิมา ไดอิจิของบริษัท โตเกียว อิเล็กทริก เพาเวอร์ หรือเทปโก้ (Tokyo Electric Power Company Inc: TEPCO) ซึ่งช่วยให้มองเห็นโครงสร้างที่อยู่ในพื้นที่สูงและแคบได้ หุ่นยนต์สำรวจที่ได้รับการพัฒนาขึ้นมาใหม่นี้เริ่มออกปฏิบัติงานภายในโรงปฏิกรณ์นิวเคลียร์ตั้งแต่วันที่ 18 มิถุนายน 2556
หุ่นยนต์สำรวจดังกล่าวได้รับการพัฒนาขึ้นเพื่อรองรับความต้องการใช้งานจริง โดยอ้างอิงข้อมูลจากเทปโก้ เกี่ยวกับสภาพภายในโรงปฏิกรณ์ โดยเอไอเอสทีได้พัฒนาแพลตฟอร์มเพื่อใช้ในการเคลื่อนที่บนพื้น
ต่างระดับ ส่วนฮอนด้าเป็นผู้พัฒนาแขนหุ่นยนต์สำรวจที่ติดตั้งอยู่ส่วนบนสุดของแพลตฟอร์ม
ฮอนด้าได้นำเทคโนโลยีที่พัฒนาขึ้นสำหรับอาซิโม หุ่นยนต์คล้ายมนุษย์มาใช้ในการพัฒนาแขนหุ่นยนต์สำรวจได้แก่
• เทคโนโลยีการแสดงภาพโครงสร้าง 3 มิติ รอบๆ สิ่งที่ทำการสำรวจ โดยใช้ระบบ 3D พอยต์คลาวด์ (point cloud) (กลุ่มของจุดตัดในระบบพิกัดตำแหน่ง)
• ระบบควบคุมที่สามารถควบคุมข้อต่อแขนกลได้หลายจุดพร้อมๆ กัน
• เทคโนโลยีควบคุมที่ช่วยให้แขนหุ่นยนต์สามารถดูดซับแรงกระแทกที่อาจกระทบกับโครงสร้างโดยรอบ
ด้วยเทคโนโลยีดังกล่าว ทำให้แขนหุ่นยนต์ที่ได้รับการพัฒนาขึ้นมาใหม่นี้สามารถเข้าถึงวัตถุที่มองเห็นได้ยาก ซึ่งอยู่ข้างหลังวัตถุอื่นๆ ในสภาพแวดล้อมที่มีโครงสร้างซับซ้อนภายในโรงปฏิกรณ์ได้อย่างง่ายดาย โดยใช้การควบคุมข้อต่อแขนกลในหลายจุดพร้อมๆ กัน และเมื่อเข้าถึงวัตถุ หุ่นยนต์จะใช้กล้องซูม
เครื่องกำหนดพิกัดด้วยเลเซอร์ และอุปกรณ์วัดปริมาณกัมมันตรังสีที่ติดตั้งบนปลายแขน เพื่อยืนยันรายละเอียดของภาพ เก็บข้อมูลแบบ 3 มิติ พร้อมทั้งระบุแหล่งกัมมันตรังสี
สำหรับแพลตฟอร์มเพื่อใช้ในการเคลื่อนที่บนพื้นต่างระดับ ใช้โครงสร้างที่มีศูนย์กลางความถ่วงต่ำ เพื่อให้หุ่นยนต์ทรงตัวได้ โดยเอไอเอสทีใช้เทคโนโลยีการควบคุมจากระยะไกล และวางตำแหน่งกล้องได้อย่างชาญฉลาด มีการใช้หลอดไฟ เครื่องกำหนดพิกัดด้วยเลเซอร์ และอุปกรณ์อื่นๆ จึงสามารถควบคุมหุ่นยนต์ได้ในระยะ 400 เมตร ผ่านเครือข่ายไฟเบอร์ออพติกระบบ LAN แบบมีสาย และระบบ LAN แบบไร้สาย
นอกจากนี้ ฮอนด้าและเอไอเอสทียังร่วมกันพัฒนาระบบควบคุมจากระยะไกลเพื่อให้ผู้ใช้งานสามารถควบคุมการทำงานของหุ่นยนต์จากสถานที่ที่อยู่ห่างไกลได้ อาทิ จากอาคารป้องกันแผ่นดินไหว และยังช่วยให้หุ่นยนต์สามารถปฏิบัติงานในพื้นที่มืดและแคบภายในโรงปฏิกรณ์ได้อีกด้วย โดยเมื่อหุ่นยนต์เข้าถึงจุดเป้าหมาย เสาจะยืดขึ้นเพื่อสำรวจพื้นที่ที่อยู่ในระดับสูงได้ถึง 7 เมตร โดยไม่ชนกับโครงสร้างโดยรอบ
ข้อมูลจำเพาะของหุ่นยนต์สำรวจ
1.ความยาว | 1.8 เมตร |
2.ความกว้าง | 0.8เมตร |
3.ความสูง | 1.8เมตร (สำหรับการขนส่ง/เคลื่อนย้าย) |
4.ระดับสูงสุดที่หุ่นยนต์เข้าไปสำรวจได้ | 7.0 เมตร |
5.น้ำหนัก | ประมาณ 1,100 กิโลกรัม |
6.แขนของหุ่นยนต์ | ความยาว: 1.7เมตร องศาอิสระในการเคลื่อนไหว:11 |
7.ประสิทธิภาพในการเคลื่อนที่ | ความเร็วในการเคลื่อนที่สูงสุด: 2กม.ต่อชั่วโมง 20องศา (ด้านข้าง) |
นอกจากความคืบหน้าในการพัฒนาอาซิโม หุ่นยนต์คล้ายมนุษย์ที่สามารถช่วยเหลือผู้คนและอยู่ร่วมกับผู้คนในชีวิตประจำวันได้แล้ว ฮอนด้ายังศึกษาและวิจัยความเป็นไปได้ในการใช้หุ่นยนต์คล้ายมนุษย์ในพื้นที่ภัยพิบัติ จากการพัฒนาแขนหุ่นยนต์สำรวจดังกล่าว ฮอนด้าจะเร่งพัฒนาหุ่นยนต์คล้ายมนุษย์ที่ออกแบบมาเพื่อให้ความช่วยเหลือในเหตุการณ์ภัยพิบัติต่างๆ รวมถึงการป้องกันและลดความเสียหายที่เกิดจากภัยพิบัติอีกด้วย
จากเหตุการณ์แผ่นดินไหวในภาคตะวันออกของญี่ปุ่น เอไอเอสทีได้ให้การสนับสนุนเพื่อการฟื้นฟูในหลายรูปแบบ อาทิ การสำรวจพื้นที่ที่มีการรั่วซึมของน้ำทะเลในชั้นใต้ดินบริเวณที่ได้รับผลกระทบจากการเกิดสึนามิ การเป็นผู้นำโครงการ Kesennuma Kizuna การวัดปริมาณการแพร่กระจาย และการกำจัดสารกัมมันตรังสี การลดปริมาณสารกัมมันตรังสีซีเซียมภายในโรงงาน เอไอเอสทียังคงเดินหน้านำเทคโนโลยีหุ่นยนต์มาใช้เพื่อสนับสนุนความพยายามในการปิดโรงไฟฟ้านิวเคลียร์ฟุกุชิมา ไดอิจิของเทปโก้
ตารางราคารถยนต์ล่าสุด
AUDI | Aston Martin | BMW | Chevrolet | CITROEN | DFSK | Ferrari | Honda (ฮอนด้า) |บทความแนะนำ



